
基于五轴伺服机械手
顺序代码:49547年
类别:机器人培训
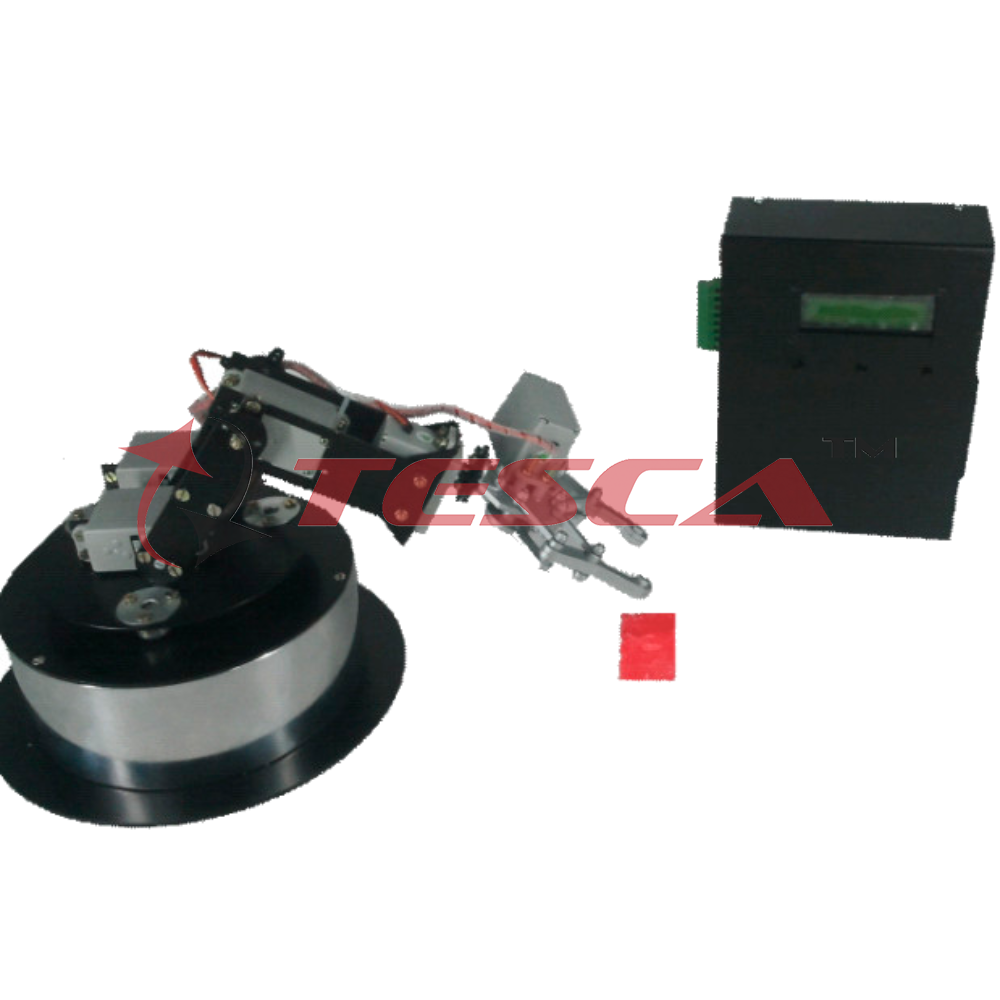
机械手臂是5轴机械臂伺服爪。它使用4齿轮转矩伺服电动机与5公斤/厘米,两个伺服电机转矩与7公斤/厘米。机器人手臂有5个自由度,其中包括:基地旋转,肩膀旋转,旋转肘、手腕……
规范
机械手臂是5轴机械臂伺服爪。它使用4齿轮转矩伺服电动机与5公斤/厘米,两个伺服电机转矩与7公斤/厘米。机器人手臂有5个自由度,其中包括:基地旋转,肩膀旋转,旋转肘、手腕音高。机械手臂是预先安装的还有通用伺服电机控制器可以同时控制6伺服电机速度轨迹概要文件在同一时间,一个先进的GUI界面机械手臂运动和5 v-5a smp。
技术规格:
技术规格:
- 总自由度:5
- 基地AOF: 180°(大约)
- 肘部AOF: 180°(大约)
- 肩膀AOF: 180°(大约)
- 基地AOF: 180°(大约)
- 夹钳位移:45毫米线性的
- 传感器:颜色传感器(对比-
- 黑色/白色)(包括)
- :加速度计(可选)
- :近距离传感器(包括)
- 有效载荷:50克
- 解析:5毫米-20%
- 可重复性:5毫米-20%
- 爪:平行下巴
- 执行机构:齿轮直流电机
- 重量:2公斤(大约)
查询表格









半岛登陆手机版Tesca专门做交钥匙工程移交时完全可操作的项目的权威。从《盗梦空间》应用培训,Tesca提供服务作为一个来源的解决方案。半岛登陆手机版肩并肩的工作与政府当局和世界各地的人,我们帮助各国更好地执行。我们支持国家经济增长,加强教育和卫生系统和改善财务管理。我们通过提供咨询和培训环境安全、教育、卫生加强。
 91 - 9829132777
91 - 9829132777半岛sports官网下载