
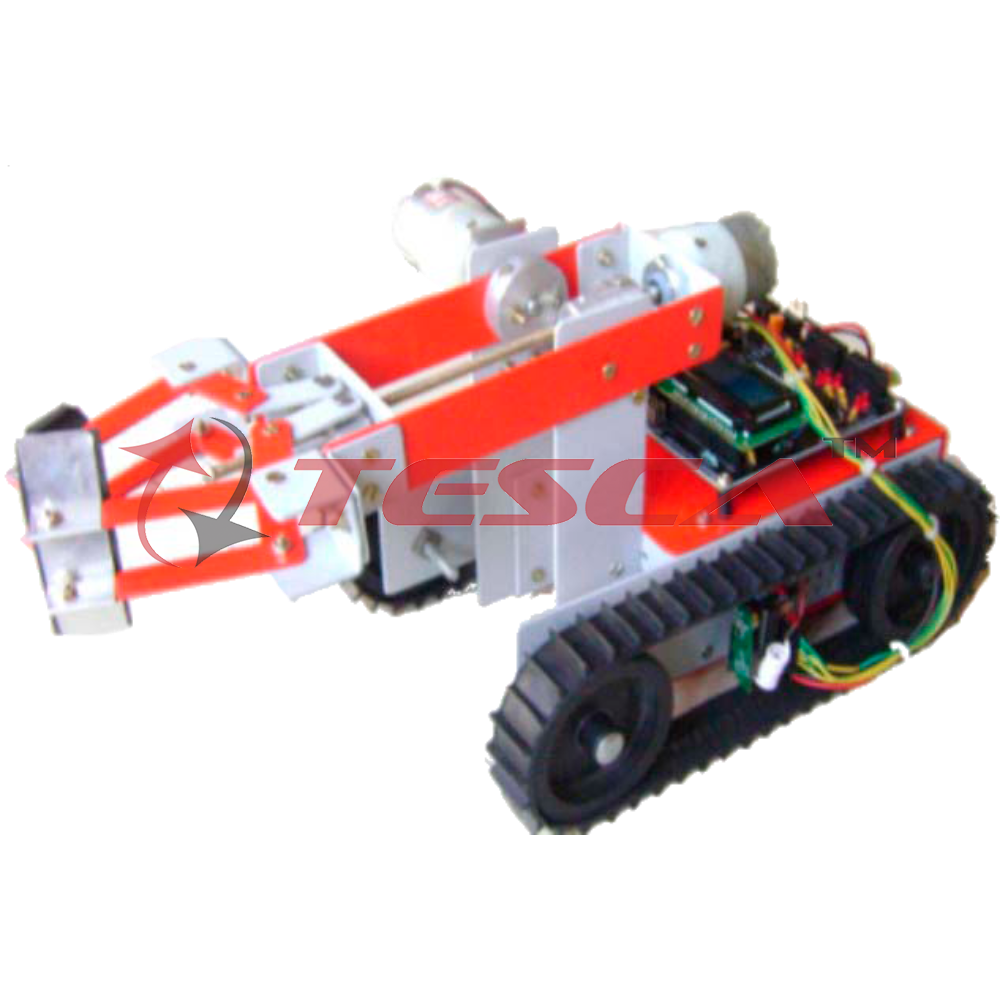
URDP手臂工具包
规范
这个套件包括铝零件,组件、汽车、车轮和轨道。结合所有这些部分用户可以创建一个选择和地点机器人抓手。独特设计的夹具使其持有对象一样巨大的10厘米,宽1厘米。这个工具包为机器提供了一个额外的2自由度。高转矩电动机在一臂关节使它能够提升负荷的200克。装备的控制部分是基于8051单片机,配备汽车司机和ISP设施计划它。
机械装配的特点:
机械装配的特点:
- 丝杠安排爪
- 独特的轴耦合器
- 橡胶履带的额外的吸引力
- 4轮组装扩展为更好的稳定性
机器人控制器的特点:
- 8051年核心NXP P89V51RD2
- 车载汽车司机,驾驶4直流电机或2步进电机
- 在董事会层面上变频器的串行通信
- 船上功率调节器
- 16 x2液晶屏
- 接线盒,以方便连接的马达
- 防止噪声和EMF回来
- 防止错误的电池/电源的极性连接
- 车载led进行调试和测试
查询表格









半岛登陆手机版Tesca专门做交钥匙工程移交时完全可操作的项目的权威。从《盗梦空间》应用培训,Tesca提供服务作为一个来源的解决方案。半岛登陆手机版肩并肩的工作与政府当局和世界各地的人,我们帮助各国更好地执行。我们支持国家经济增长,加强教育和卫生系统和改善财务管理。我们通过提供咨询和培训环境安全、教育、卫生加强。
 91 - 9829132777
91 - 9829132777半岛sports官网下载