
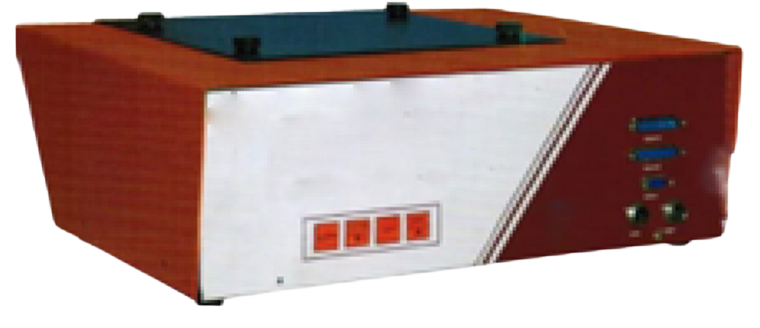
DL ROBSIX电动六轴机械手X2

规范
- 教练必须模拟工业机器人的操作,如整体旋转臂旋转,前臂旋转、手腕旋转,爪旋转,钳子打开/关闭。
- 它必须集成各种不同的技术,如皮带传动传动技术、步进马达驱动器,位置检测,PLC技术、微处理器技术。
- 一定是主要用于教学、演示实验,实践培训,课程设计和科学研究。
- 应当可以培养学生了解机械结构和传动设计和电气控制系统的硬件和软件调试,分析问题和解决出现的问题,在实际的操作过程。
- 这个教练应当由单片机或PLC控制嵌入到控制箱。
- 所有的控制点和PLC IOS必须控制箱面板上可用。
- 发光二极管和示意图必须应用显示不同关节的作用。
- 规格:
- 电源:220 v = 1096, 50赫兹
- 角度/距离范围:机械手旋转角度:1800
- 上臂旋转角度:1000
- 前臂旋转角度:1000
- 手腕旋转角度:1000
查询表格







半岛登陆手机版Tesca专门做交钥匙工程移交时完全可操作的项目的权威。从《盗梦空间》应用培训,Tesca提供服务作为一个来源的解决方案。半岛登陆手机版肩并肩的工作与政府当局和世界各地的人,我们帮助各国更好地执行。我们支持国家经济增长,加强教育和卫生系统和改善财务管理。我们通过提供咨询和培训环境安全、教育、卫生加强。
 91 - 9829132777
91 - 9829132777半岛sports官网下载